危重患者呼吸管理新策略:基于食道压的跨肺压监测技术综述
时间:2024-06-09 22:00:58 热度:37.1℃ 作者:网络
文献摘要
本文综述了基于食管压力测量的跨肺压监测在危重患者呼吸病理生理个性化机械通气中的应用。跨肺压监测有助于区分肺和胸壁之间的呼吸力学,为肺复张和气压伤风险提供信息,并有助于滴定呼吸衰竭患者的机械通气设置。尽管食管压监测在临床实践中未被充分利用,但本综述强调了其在辅助通气模式和无创呼吸支持中的重要性。
关键点分析
-
生理基础:跨肺压的定义及其与肺泡压和胸膜压的关系。
-
测量技术:食管压作为胸膜压的代表,以及其测量的准确性和局限性。
-
临床应用:跨肺压监测在评估肺和胸壁弹性、滴定机械通气设置、评估吸气努力和呼吸功等方面的应用。
-
技术争议:关于食管压监测数值的技术方面、解释和临床决策的争议。
批判性评价
-
局限性:食管压力监测的复杂性可能导致其在临床实践中的低利用率。此外,对于食管压力监测的解释存在争议,可能影响其临床应用。
-
改进方向:需要进一步的研究来简化监测技术,提高其在临床上的可行性和准确性。同时,需要更多的教育和培训来提高医生对这项技术的认识和使用能力。
个人见解
跨肺压监测技术为危重患者的呼吸管理提供了一个有力的工具,有助于实现更精准的机械通气设置。然而,要充分发挥其潜力,需要克服当前的技术复杂性和临床应用中的不确定性。未来的研究应该集中在简化监测过程、提高准确性以及教育医疗专业人员如何有效利用这项技术。
结论
尽管存在挑战,基于食管压力测量的跨肺压监测对于改善危重患者的呼吸支持具有重要价值。通过进一步的研究和教育,这项技术有潜力被更广泛地应用于临床实践,从而提高患者的治疗效果和生存率。
关键词: 食管压力监测,跨肺压,危重患者,呼吸管理,机械通气,个性化治疗,肺复张,气压伤风险,辅助通气,无创呼吸支持
基于食管压力测量的跨肺压监测对危重患者基于呼吸病理生理的个性化机械通气做出了重要贡献。然而,食管压监测在临床实践中仍未得到充分利用。该技术可以将呼吸力学在肺和胸壁之间分开,提供有关肺复张和气压伤风险的信息,并有助于滴定呼吸衰竭患者的机械通气设置。在辅助通气模式和无创呼吸支持期间,食管压监测可提供有关吸气努力和呼吸功的重要信息。尽管如此,关于该监测技术得出的数值的技术方面、解释和临床决策仍存在一些争议。本综述旨在总结食管压监测的生理基础,讨论其临床应用的利弊以及对接受有创和无创呼吸支持的危重患者的不同解释。
介绍
跨肺压 (P L ) 对应于施加于肺部的膨胀力 (应力),其导致肺部发生机械变形 (应变)。健康受试者和急性呼吸窘迫综合征 (ARDS) 患者的应力和应变呈线性关系,即,其中 k 是比弹性 。跨肺压的正确生理定义是,其中 P ALV是肺泡压,P pl是胸膜压。虽然 P ALV等于吸气末或呼气末静态条件下的气道压力 (P AW ),但 P pl需要间接估算。由于食管在胸膜腔内的解剖位置,食管压 (P es ) 代表 P pl :因此,在临床实践中,跨肺压可估算为。这种近似值的使用对于了解危重患者的呼吸病理生理和个体化机械通气具有重要意义。使用食管球囊测量 P es需要专业知识,正确解释 P es得出的跨肺压需要深入了解使用 P es估计 P pl的潜在假设。可能由于这种复杂性,食管压力监测在临床实践中仍未得到充分利用,在最近的一项大型国际观察研究中,只有不到 1% 的 ARDS 患者接受了这种监测工具。

本综述的目的是总结食管压监测的生理基础,讨论其临床应用的利弊以及在接受无创和有创呼吸支持的危重患者中的不同解释。
食管压力的决定因素
在直立位时,食管压力变化准确反映了作用于肺表面特定部位胸膜压的整体变化。然而,在平卧位时,若干因素可能会影响使用充气球囊测得的食管内压力值。其中,决定P es最重要的因素包括:胸壁弹性、胸壁高度、腹部膨胀将膈肌向上推以及位于食管球囊上方纵隔器官的重量。此外,食管壁的弹性、平滑肌对球囊存在的反应以及食管球囊本身的弹性都会影响测量,而心脏收缩的传递会引入伪影,这可能会进一步使P pl的解释复杂化。
尽管存在这些已知的局限性,正确放置该装置即使在仰卧位下也能对 P pl的变化做出合理的估计,并且实验研究表明 ,其与直接在中胸膜腔测得的压力有很好的相关性。一项对健康受试者的研究通过改变身体姿势来估计纵隔和肺重量对 P es的影响,结果平均值为 3 cmH 2 O 。如果不考虑这一因素,则会导致对依赖性肺部区域的P pl稍高估,从而低估 P L ,并会导致对大多数非依赖性肺部区域的P pl 稍低估,从而高估 P L 。此外,食管球囊经常用于需要肠内喂养的患者,但鼻胃管的存在不会显著改变P es的测量结果,而且业内已经推出了结合鼻胃管和食管压探头功能的导管。
使用 P es代替 P pl
优点:P es的绝对值可以合理替代P pl,并可以在床边对跨肺压进行实用的估计。
缺点:如果纵隔重量较大且肺部受损,P es可能与实际P pl不同,这在床边可能难以评估。
食管球囊定位
食管内的压力沿其轴线方向变化。使用多探头高分辨率测压法测量食管不同部位的压力是不规则的。尽管如此,所有呼吸生理学研究都集中于对食管远端 1/3 处的测量:因此探头的正确放置至关重要。但一项比较中段(距口腔 20-35 厘米)与远端(距口腔 40-45 厘米)食管探头定位的研究显示,探头定位对 PL 估计值的影响极小,这表明可以接受一定的灵活性。心脏脉搏伪影的存在进一步证实了食管下 1/3 处的定位。某些食管球囊制造商插入了不透射线的标记物,以便通过放射学确认正确定位。除了正确定位之外,探头的充足充气量也是正确解读食管压力的关键。
使用基于插入深度的标准定位
优点:对于大多数患者来说足够了。
缺点:如果患者身高极矮或极高,可能需要调整定位,因为解剖变异会导致插入困难。此外,盲目定位可能会导致深度镇静患者的气道意外错位;在这种情况下,应考虑使用直接或视频喉镜检查来确认定位是否正确。
食管球囊充气
大多数食管探头制造商建议根据装置的尺寸和弹性特性,用固定量的空气给球囊充气,范围从 0.5 到 4 毫升。然而,球囊的直径、尺寸、材料和顺应性等技术特性会根据其充气量影响胸壁压力变化向球囊的传递。几位作者建议单独滴定充气量。事实上,充气不足会导致轻微的心脏伪影,但会低估基线 P es和潮气呼吸期间 P es波动,而充气过量则会高估 P es 。最佳充气目标是使气道阻塞试验中P es和 P aw的变化比值最接近于 1,而其他专家建议充气目标是使球囊保持在食管球囊压力-容积曲线的线性部分,同时使吸气末 P es和呼气末P es 之间的差异最大化。由于大多数球囊通过三通旋塞阀和导管连接到呼吸机辅助端口或专用监测系统,因此可能会发生漏气:应定期检查球囊填充情况以确保测量质量。为了减少心脏噪声的传输并将泄漏风险降至最低,有人提出了对球囊进行液体填充,但在临床实践中很少使用。
使用标准球囊充气量
优点:按照制造商的建议给气球充气,可以在许多临床条件下提供可接受的 P es测量值。
缺点:标准充气量可能导致对 P pl的估计过高或过低,可能需要进行单独滴定以避免对 P L的误解。
闭塞操作以确认定位和充气
如上所述,球囊的定位和充气都会影响 P es。可以使用闭塞试验检查球囊的定位和充气是否正确:当呼气末气道闭塞时,P pl的变化会通过肺部传递到气道。闭塞期间,P es的变化(ΔP es )等于 P aw的变化(ΔP aw ),因此假设 P pl = P es,它们的比率应为 1 (ΔP es / ΔP aw = 1) [ 18 ] 。通常认为 10% 或 20% 的容差是可以接受的,分别对应 ΔP es / ΔP aw从 0.9 到 1.1 或从 0.8 到 1.2。对于自主呼吸的患者,闭塞试验期间评估的气道压力变化与等长吸气努力引起的 P es负向波动相对应(图1)。对于服用镇静剂的被动患者,必须通过轻柔的胸外按压(图 2)来引起压力变化,以产生安全但可测量的 ΔP aw ,通常目标是5 至 15 cmH 2 O 之间的值。当 ΔP aw和 ΔP es相等时,它们的差值,即 ΔP L,为零。在现代呼吸机和监护仪中,可以实时绘制 PL 轨迹(图 1 和 2 中的绿色图 ),验证PL在吸气或闭塞测试中的胸外按压期间保持恒定可进一步确认球囊的正确定位和充气。图 1和2说明了这些概念,并提出了一种评估球囊定位和填充的算法。必须强调的是,以 ΔP es和 ΔP aw之间的比率为特定的可接受范围为目标,在数学上相当于引入 10 到 20% 的系统百分比误差。这具有重要意义,尤其是对于校准时 ΔP es变化较小的患者,即那些自主呼吸且吸气努力有限的患者或那些在控制通气中胸部按压导致 ΔP es变化较小的患者。在这些受试者中,虽然在校准过程中 ΔP es和 ΔP aw之间的绝对差异是有限的,当潮气呼吸期间产生高吸气压力或增大的吸气力度时,10-20%的百分比误差可能会导致很大的绝对误差。
图1
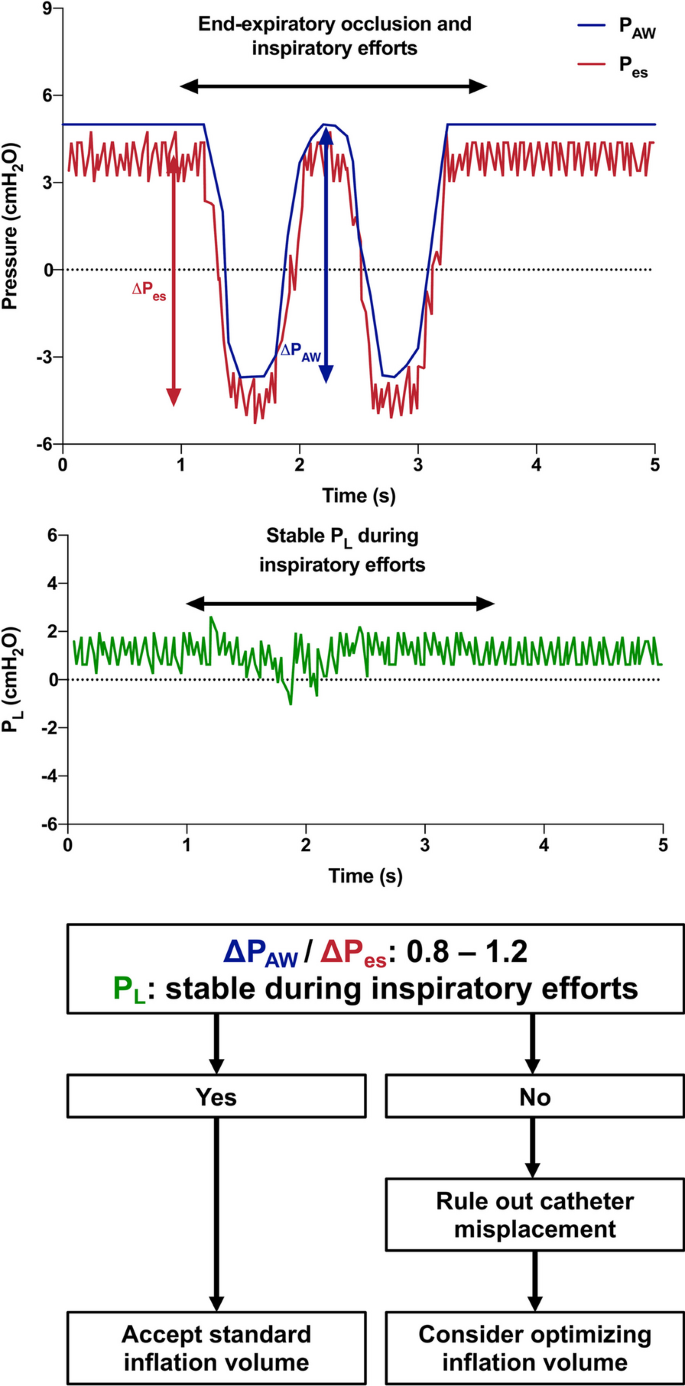
阻塞试验用于确认接受辅助通气的主动患者食管气囊的正确定位和充气。进行呼气末阻塞试验,在此期间观察到胸膜压力 (P es ) 和气道压力 (P AW ) 的负偏转。在吸气过程中,跨肺压 (P L ) 保持稳定
图 2
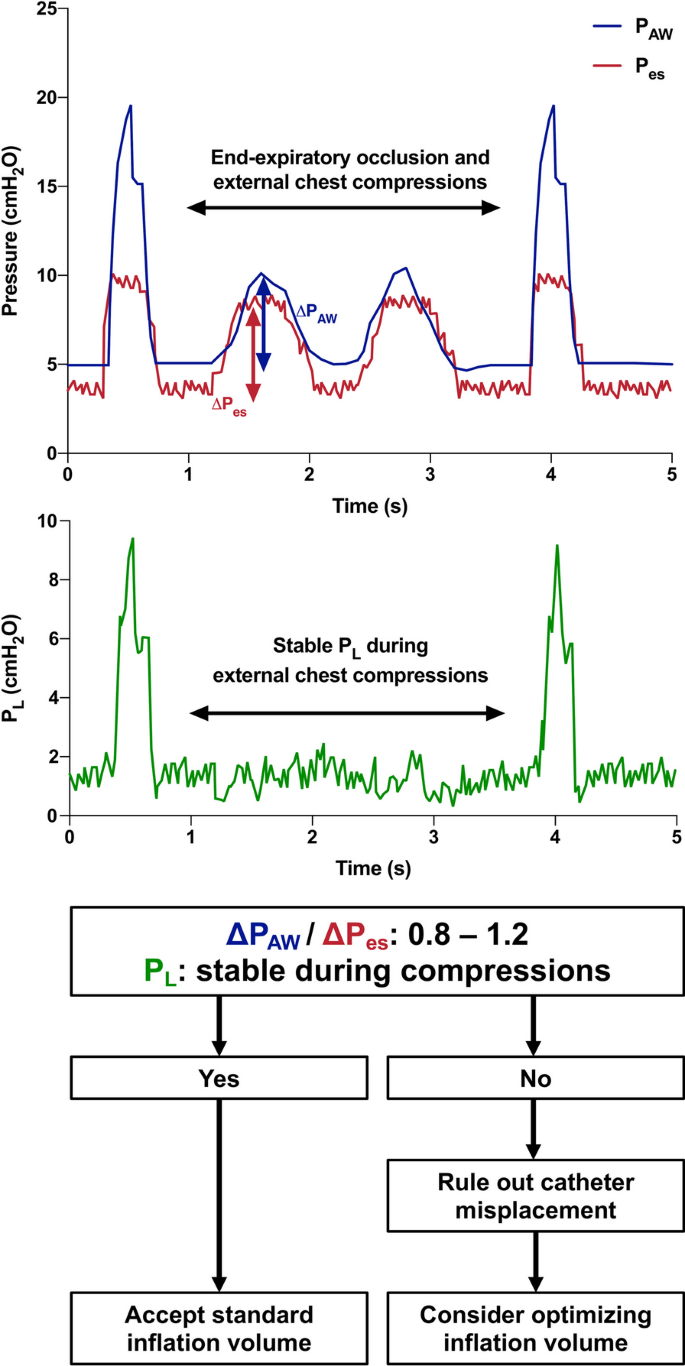
闭塞试验用于确认在接受控制通气且无自主呼吸活动的镇静患者中食管气囊的正确定位和充气。进行呼气末闭塞,并进行轻柔的胸外按压。胸膜压力 (P es ) 和气道压力 (P AW ) 的正向波动反映了由于外部按压导致的胸内压力增加。在闭塞操作期间,跨肺压 (P L ) 保持稳定
闭塞试验和胸外按压试验以验证充气和定位
优点:用于验证气球定位和充气的简单而成熟的方法。
缺点:球囊错位可能难以评估,尤其是在被动情况下,当球囊不在食管远端三分之一处时,球囊压力波动的幅度也可能提示定位是否正确。在主动患者中,吸气努力可能不规律,使得球囊膨胀滴定困难。
控制通气中食管压力的解释
一旦确保食管球囊的正确定位和充气,就需要进一步的推理和计算,以将其用作滴定机械通气设置的工具。
呼吸力学的绝对值和分割
在被动机械通气患者中,食管压监测的最简单应用是将呼吸系统弹性 (E rs ) 分为两个部分:肺弹性 (E L ) 和胸壁弹性 (E cw ) 。弹性定义为压力变化与容积变化之间的比率,以 cmH 2 O/L 为单位,是顺应性 ( C ) 的倒数,因此 E = 1/C。弹性具有加性,因此 E rs = E L + E cw;由于肺部容积变化由于解剖学上的连续性而通过胸壁的相等容积变化来反映,这种性质转化为驱动压 (ΔP),即潮气呼吸时吸气末期和呼气末期压力之间的差值。因此 ΔP rs = ΔP L + ΔP cw,其中 ΔP cw等于驱动食管压 (ΔP es )。如图 3所示,在呼吸机测得的平台压相同的情况下,E cw增加的患者吸气末跨肺压较低,因此肺应变也较低。这是以下概念的病理生理基础:在 E cw增加的情况下,可以耐受较高的气道平台压,例如肥胖患者或腹腔内高压患者 。
图 3
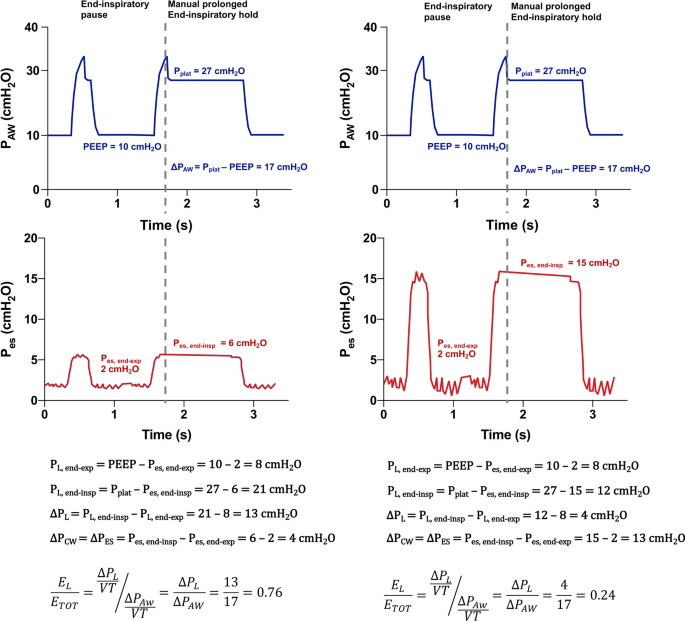
胸壁弹性正常(左)或增加(右)的患者的气道压力(上图)和食管压力(下图)。在增加的气道平台压和驱动压(分别为 27 和 17 cmH 2 O)相同的情况下,胸壁弹性增加的患者在吸气末产生的跨肺压和跨肺驱动压较低。报告的弹性比显示,在左侧患者中,总弹性的 76% 由肺弹性构成,而在右侧患者中只有 24%。P AW:气道压力;P es:食管压力;P CW:胸壁压力;P L:跨肺压;P plat:平台压;PEEP:呼气末正压
根据食管压力划分肺和胸壁弹性
优点:食管压力监测可以将整个呼吸系统力学分为肺部和胸壁部分。
缺点:关于吸气末和潮气驱动跨肺压的安全上限,共识有限。在 ARDS 中,吸气末跨肺压低于 15–20 cmH 2 O 和潮气驱动压低于 10–12 cmH 2 O 可能是可以接受的。传统的分区方法没有考虑到胸膜压力的区域差异。
弹性衍生解释
弹性导出法建议使用肺弹性与总弹性的比率(弹性比率,ELS / Ers )作为乘性校正因子,应用于呼吸机上测量的压力(图 3)。ELS /Ers比率在被动条件下可以测量为(ΔPrs - ΔPes ) /ΔPrs ,在患有ARDS的重症患者中通常在0.5或更低到0.9之间。它可以被看作是传输到肺部的气道压力的一部分。根据该方法,吸气跨肺压被校正为Pplat ,弹性导出 = Pplat⨉ELS / Ers ,并已被证明能准确反映非依赖区域的区域跨肺压。该方法已被一些研究小组广泛使用;然而,当用它作为设定呼气末正压(PEEP)的指导时,它与依赖PES绝对值的方法一致性较差。
跨肺压的弹性解释
优点:基于弹性的跨肺压解释可以估计被动患者的吸气压力在肺和胸壁之间是如何分配的。
缺点:这种方法倾向于反映腹侧肺的弹性特性,而关于背部相关区域的信息有限。
PEEP 释放法
为了避免PEEP对胸壁弹性特性可能产生的混杂因素,提出了PEEP释放法,该方法基于对PEEP潮气呼吸期间跨肺压值与呼气末压力为零时获得的跨肺压值的比较 。图4提供了该计算的详细信息 ;对于弹性导出方法,用该方法获得的值与依赖P es绝对值的值之间的一致性较差。
图 4
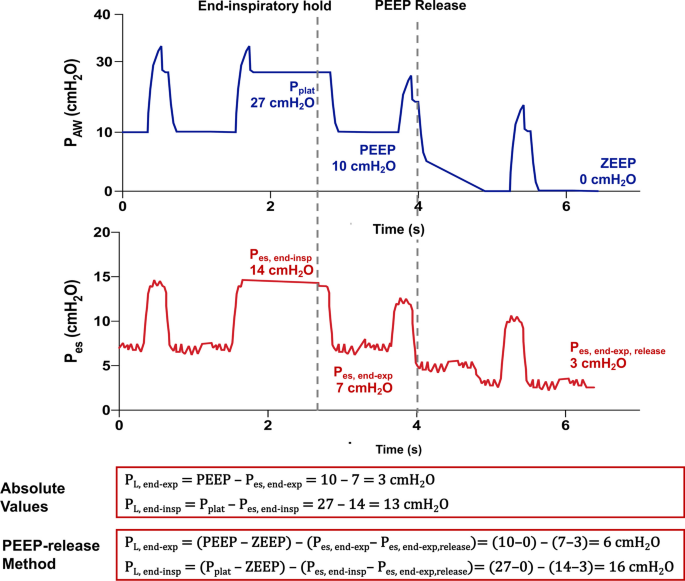
比较基于绝对值计算的跨肺压和使用 PEEP 释放法计算的跨肺压。从 10 cmH 2 O 的初始 PEEP 开始,执行 peep-release 操作以测量 ZEEP 时的呼气末食管压值。P AW:气道压;P es:食管压;P L:跨肺压;P plat:平台压;PEEP:呼气末正压;ZEEP:零呼气末压力
PEEP 释放对跨肺压的解释
优点:该方法可以测量跨肺压,避免PEEP对胸壁的影响。
缺点:该方法复杂,接受度有限,且需要在 PEEP 为 0 cmH 2 O 时获取呼吸力学数据,这一过程可能会引起严重缺氧血症患者的安全问题。
PEEP阶跃法
一个研究小组提出了一种不使用食管球囊来估算跨肺压的方法,该方法基于测量PEEP突然变化后呼气末肺容积的变化。该方法已在体外模型中得到验证,但隐含地假设无论应用的PEEP水平如何,用食管测压法估算的呼气末跨肺压都为零,这与其他临床研究相矛盾。
PEEP 阶梯法评估跨肺压
优点:该方法无需食管球囊即可评估跨肺压。
缺点:验证和临床接受度有限。
胸膜压的区域变异性和校正因子的应用
决定区域水平P pl的一个重要因素是肺组织和纵隔的重量造成的静水压,该重量位于 P pl 测量点的上方[31,32]。这导致平卧时 P pl 存在从腹侧到背部的梯度;因此,只有在与胸壁食管位置相对应的水平上测得的P pl才准确近似于 P pl 。如图 5 A 所示,在健康肺中,最背部区域的叠加压力约为 3 cmH 2 O ,因此假设食管位于腹背轴的中间位置,最腹侧或背部区域 的P pl可能与测得的 P es有 ± 1.5 cmH 2 O的偏差,在大多数临床环境中,这个值可以忽略不计。在 ARDS 中,完全平卧时,受损肺的重量会使该压力梯度增加至平均值 10 cmH2O (图 5B),因此 P pl , dorsal ≈ P es + 5 cmH2O和P pl,ventral ≈ P es − 5 cmH2O 。因此,ARDS 中的叠加压力与床边滴定机械通气时施加的压力变化(特别是 PEEP)的数量级相同。这在使用 P es指导临床决策时具有实际意义。事实上,使用 P es作为平均 PL 的估计值来滴定包括 PEEP 在内的机械通气参数相当于针对肺部中部区域。这可能导致气道压力不足以完全复原背部区域,但仍会导致腹部区域过度膨胀。
图 5

健康患者 ( A ) 和 ARDS 患者 ( B ) 中叠加压力对食管压力的影响。食管压力低估了非依赖区域的跨肺压,而高估了背部区域的跨肺压,尤其是在受伤的肺部。P AW:气道压力;P es:食管压力;P L:跨肺压;P plat:平台压力
使用 P es校正因子估算区域 P pl
优点:应用±5cmH2O的校正因子可以估计ARDS中的区域Ppl ,从而可以分别评估有失复风险的肺部区域和有气压伤风险的肺部区域的Pl 。
缺点:校正因子大大复杂化了 P es的解释。基于未校正的 P es值滴定通气设置已经代表了背部肺复张风险和腹部过度膨胀之间的折衷。
根据呼气末跨肺压进行 PEEP 滴定
假设 P es等于 P pl,则绝对呼气末跨肺压为 P L,end-exp = PEEP tot − P es,end-exp。ARDS 患者的该值通常在 − 10 至 + 10 cmH 2 O 之间,并受 PEEP 和体位 的影响。基于电阻抗断层扫描 (EIT) 的研究证实,PL,end-exp为负值与肺依赖区肺复张减少有关。第一项随机试验比较了旨在维持严格非负 PL ,end-exp 的PEEP 滴定策略,结果显示,与传统的低 PEEP/FiO 2表策略相比,该策略的氧合得到改善。然而,在一项更大规模的随机试验中,该策略并不优于传统的高 PEEP/FiO 2表 。尽管如此,后一项试验的子研究发现,将 PEEP 至 P L,end-exp滴定至接近零值 (± 2 cmH 2 O) 与死亡率改善相关,而更高的值可能导致高静态应变和更高的死亡率。
根据呼气末跨肺压进行 PEEP 滴定
优点:这种方法可能有助于识别具有相应数量肺组织失复的患者并个性化 PEEP 设置。
缺点:随机试验未显示明确的死亡率益处。将 PEEP 增加至过正 P L,end-exp可能导致更糟糕的结果。
使用跨肺压评估 VILI 风险
肺部区域暴露于过高的吸气压力是呼吸机相关性肺损伤 (VILI) 的主要决定因素 。在 ARDS 患者中,在仰卧位进行被动控制通气时,接受通气最多的非依赖性腹侧区域的风险更高。在吸气末,可以通过弹性衍生方法正确估算腹侧肺的 PL ,或在 PL 的绝对测量值上应用 +5 cmH2O 的校正 ;但是,使用固定校正因子也过于简单,因为其确切值取决于 ARDS 的严重程度。为了评估动态应变,可以使用跨肺驱动压 (ΔPL),计算为 PL , end-insp减去 PL ,end-exp。
使用跨肺压评估 VILI 风险
优点:限制吸气和驱动跨肺压可以保护肺部免受过度压力和劳损。弹性衍生方法或对绝对测量应用 + 5 cmH 2 O 校正系数可反映施加于腹部区域的压力。
缺点:缺乏对安全阈值的共识。
辅助通气中食管压力的解释
在接受有创辅助通气的主动呼吸患者中应用食管压力监测需要单独考虑。吸气肌的激活会产生 P pl的负偏转,该偏转的幅度称为 ΔP es(图 6)。该负压会维持一段时间,即神经吸气时间,最初用于激活呼吸机的吸气触发器并克服内在(自动)PEEP 和吸气阻力,然后释放以结束吸气和循环。吸气肌产生的压力定义为
图 6
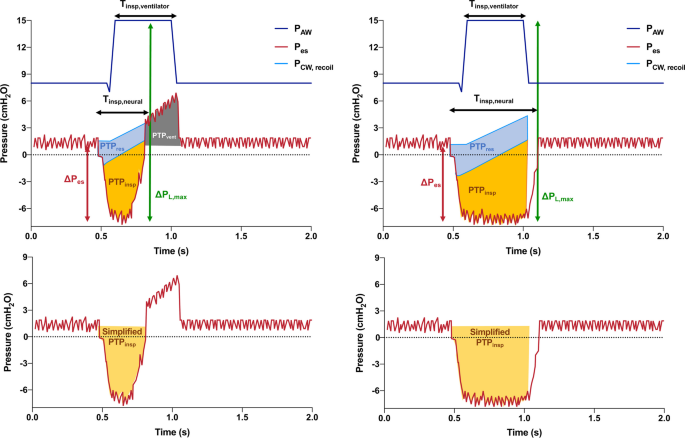
计算两名食管压力波动幅度 (ΔP es ) 相等但神经吸气时间较短 (左) 与较长 (右) 的患者的压力-时间积 (PTP)。当开始吸气努力时,患者首先必须克服内在 PEEP (PTP res,蓝色区域,上图),然后在神经吸气时间内维持负压 (PTP insp,黄色区域,上图)。与左侧患者相比,右侧患者在相同 ΔP es时具有更高的 PTP 。如果在呼吸机吸气时间结束之前终止吸气努力,则患者在吸气后期充当被动患者,此时食管压力由于呼吸机吸气压力 (PTP vent ) 而升高。反冲压的斜率是胸壁弹性;当不知道时,PTP 可以通过积分 P es而不是 P musc来近似(简化的 PTP insp,下图)。P AW:气道压力;P es:食管压力;P L:跨肺压;P CW,recoil:被动条件下的胸壁压力;PEEP:呼气末正压
吸气努力和呼吸功的评估
在辅助通气模式下滴定呼吸支持时,临床医生最好以呼吸功 (WOB) 为目标:较低的 WOB 可能反映过度辅助或过度镇静,而较高的 WOB 可能表示辅助不足或呼吸用力过大,以及患者自我造成肺损伤的风险。尽管如此,WOB 的计算很复杂,因为它被定义为吸气肌压力 (P mus ) — 容积环 的吸气部分面积。从数学角度来看,这对应于每次呼吸:


然后可以将 WOB 表示为每升生成体积的焦耳数。传统和简化 PTP 都是在临床研究中离线处理呼吸描记后计算得出的,在目前的临床实践中应用很少或根本没有。唯一可以在床边实时获得的测量值是食管压力波动幅度 (ΔP es ),这是吸气努力的粗略估计。然而,这可能会不准确地反映 WOB:如果将相同的 ΔP es应用于短神经吸气时间和长神经吸气时间,则会导致不同的 PTP es(图 6,左图和右图)。
食管压力监测是测量吸气肌活动和驱动跨肺吸气压力的参考方法。由于其复杂性,已提出了几种基于呼吸机测量(无需插入食管球囊)的替代方法来指导呼吸辅助水平和机械通气撤机。这些方法包括吸气开始后 100 毫秒的气道阻塞压力(P 01)、吸气末阻塞 和短暂呼气末阻塞测试。
根据活动患者跨肺压量化吸气活动
优点:在辅助自主呼吸期间监测 P es可以估计吸气肌活动。
缺点:除 ΔP es外,其他测量都很复杂。在多种临床情况下,可以使用不需要食管压力监测的替代指标来识别吸气活动过高的患者。
最大吸气跨肺压的评估
辅助通气中跨肺压监测的大多数研究都集中在呼吸努力的量化上。然而,在辅助呼吸过程中也可以达到较高的吸气跨肺压。图 6显示了两名接受辅助通气的患者,突出显示了呼吸周期中达到的最大PL ;由于呼气末PL可能不为0,因此它不一定对应于ΔPes和ΔPaw之和(图6上 图)。同样,在没有食管压力监测的情况下,在放松条件下对合作的患者进行吸气末阻断可以间接估计潮气呼吸期间的最大吸气PL。
监测活动性患者的吸气跨肺压
优点:限制吸气跨肺压可以在辅助呼吸期间保护肺部。
缺点:辅助自主呼吸期间缺乏安全 P L的设立阈值。
异步评估
患者呼吸肌活动与呼吸机之间意外的相互作用被称为患者-呼吸机不同步,尽管不同步与死亡率之间的因果关系尚未确定,但与危重患者的临床结果较差有关。食管压监测可以精确识别患者努力与呼吸机提供的呼吸动作之间的匹配。虽然 P es可以被视为检测不同步的参考方法,但经验丰富的临床医生通过目视检查呼吸机曲线可以正确识别大多数不同步。
使用食管压力监测活跃患者的异步性
优点:可以精确监测所有类型的患者-呼吸机不同步。
缺点:大多数情况下,可以通过目视检查呼吸机上的流量时间和气道压力时间曲线来检测异步性。
无创呼吸支持中的应用
在活动性患者中讨论的相同考虑也适用于接受非侵入性呼吸支持的患者,如常规或高流量氧疗、持续气道正压通气 (CPAP) 和双水平无创通气 (NIV)。在这些情况下,高吸气驱动力可能会增加气压伤的风险并需要气管插管。尽管如此,评估这些患者的吸气努力尤其困难。对于接受氧气治疗的患者,除了临床检查外,很少有参数可以粗略估计吸气努力,包括呼吸频率、呼吸困难程度、膈肌超声和鼻压波动。对于通过呼吸机和面罩或头盔等非侵入性接口接受正压呼吸支持的患者,由于接口容量和顺应性的混杂效应,呼吸机上由阻塞引起的操作通常不能提供关于吸气努力的可靠信息 。在这种情况下,监测 P es可以提供独特的信息,但这仍然是一个尚未得到充分探索的领域,因为临床医生往往不愿意在清醒的低氧血症患者体内插入食管球囊。
无创呼吸支持期间跨肺压监测
优点:在几乎没有其他选择的情况下,在具有挑战性的临床场景中测量吸气力度。
缺点:需要在清醒、缺氧血症患者体内放置食管球囊,带来相关不适和潜在风险。
结论
基于食管压力测量的跨肺压监测大大提高了我们对呼吸衰竭危重患者的病理生理学和治疗的认识。然而,其解释背后的生理学很复杂,简单的方法迄今为止未能扩大常规使用这种技术的临床医生数量。现代食管探头、呼吸机和专用监视器的出现使这种技术适用于任何现代重症监护病房。尽管有替代方法,但应鼓励在临床实践中使用食管压力监测,因为它可以提高对呼吸衰竭的认识,并提高危重患者机械通气的个性化。

