Eur Urol Focus:北京协和医院使用康多手术系统与达芬奇Si系统的机器人辅助根治性前列腺切除术的前瞻性双中心随机对照试验
时间:2024-06-27 12:01:50 热度:37.1℃ 作者:网络
康多手术机器人(KD-SR)是一种新开发的手术机器人。近日,来自北京大学、北京协和医院等机构的研究者们比较了使用KD-SR和达芬奇Si手术系统(DV-SS-Si)进行机器人辅助前列腺癌根治术(RARP)的安全性和有效性。

这是一项前瞻性双中心非劣效性随机对照试验,在18-75岁疑似T1-2N0M0前列腺癌(PCa)并计划接受RARP治疗的患者中展开。研究人员对他们进行的干预分别为使用KD-SR的RARP(KD-RARP)与使用 DV-SS-Si的RARP(DV-RARP)。
该研究的主要结果是手术成功,其定义如下:可按照既定方案进行手术,无需改用其他手术方式,术后没有因手术并发症而进行二次手术。次要结果是短期的功能和肿瘤学效果。非劣效性阈值设定为10%。
共有80名患者入组,而完整的分析样本最终包括79名患者(40名KD-RARP患者和39名 DV-RARP患者)。两组患者的成功率均为 100%。在拔除导尿管后的 1、2、3 和 4 周内,研究人员没有发现两组患者的尿失禁率存在差异(P > 0.05)。KD-RARP组的 Clavien-Dindo II级不良事件发生率为 20%,DV-RARP组为17.9%(P = 0.82),无≥III 级不良事件发生。KD-RARP 组的中位手术时间明显长于 DV-RARP 组(177.5分钟 vs 145 分钟,p = 0.012)。该研究的主要局限性在于随访时间较短,且存活率未被视为主要结果。
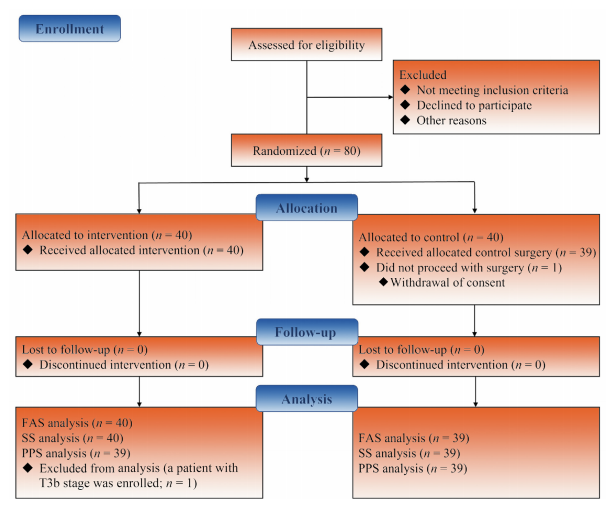
研究患者的随机化和随访
该研究表明,与DV-SS-Si相比,KD-SR是治疗 T1-2型 PCa 的RARP的可行选择,其短期疗效是可接受的。
这是第一项比较康多手术机器人(KD-SR)与达芬奇Si手术系统(DV-SS-Si)用于机器人辅助根治性前列腺切除术的前瞻性随机对照试验,试验结果表明,在治疗 T1-T2 前列腺癌的安全性和有效性方面,康多手术机器人(KD-SR)非劣效于达芬奇 Si 手术系统(DV-SS-Si)。
原始出处:
Shen C, Yan W, Chen S, et al. Robot-assisted Radical Prostatectomy with the KangDuo Surgical System Versus the da Vinci Si System: A Prospective, Double-center, Randomized Controlled Trial. Eur Urol Focus. 2024 Jun 10

